
Key word: Gradient, monitoring, PLANE OFFSET, South Total Station
Monitoring building gradient mainly to observe the displacement of the top of building M and bottom N of the corner line where two walls cross. And calculate gradient angle i and gradient direction α:
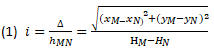
Coordinate observation method. As figure shows, after we setup Station and Back Sight, we can observe point M and N coordinate, then we can get the gradient angle i and gradient direction αby below formula.
|
|
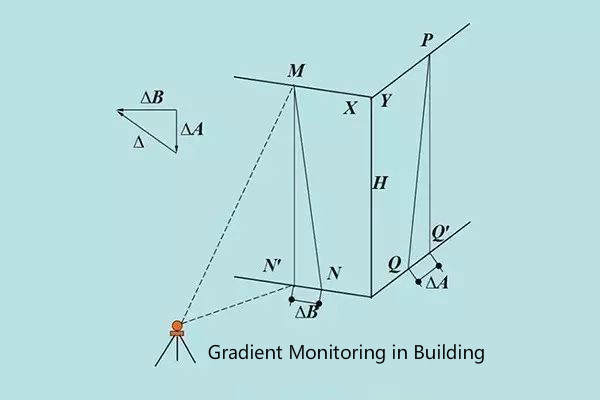

Deficiency: Because M and N is located at two walls intersection, the laser dot will split on two walls when we aim directly, it causes multi path light effect. Then the measure result error will be increased.
The result maybe not match monitoring requirement.
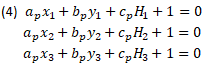
PLANE OFFSET method: Theory: base on mathematic theory: 3 points define a plane. We observe 3 points P1, P2, P3 on the wall which not in the same line. Then, the wall space P can be confirmed. We aim M by telescope, then M coordinate is showed on TS, we aim N by telescope, then, N coordinate is showed on TS.The gradient angle i and gradient direction α can be calculate by formula (1) and (2).
|
|
.jpg)

WE use SOUTH N6 total station. Angle accuracy: distance accuracy: 2”, = 3+2ppm if we only think about fix error, then . Base on distance S and vertical angle different, we can calculate N, E, Z accuracy, see below form.
PLANE OFFSET Accuracy Analysis:
FORM 1: N, E, Accuracy (mm):

FORM 2: Z Accuracy (mm):

Base on SOUTH TOTAL STATION PLANE OFFSET function, when we observe M, N, it doesn’t need emitting laser, avoid multi path light effect. From the accuracy form we can see, when STN and observe point distance around 100 meters, the N, E, Z coordinate almost no change. The PLANE OFFSET error depends on flatness of plane, notice that the positions of the three observation points form equilateral triangles as much as possible, and the length of the triangle is as large as possible.
The PLANE OFFSET function adapts to digital mapping, big area wall construction stakeout, flat inspection, it has practical advantages.
Reference information:
Point P coordinate shows

Formula (3), a, b, c can be calculated as below formula.
Point P accuracy formula: (5), (6), (7)
Assume that reference point for the known data for B () and , and variance are 0, distance variance is , horizontal angel and , then